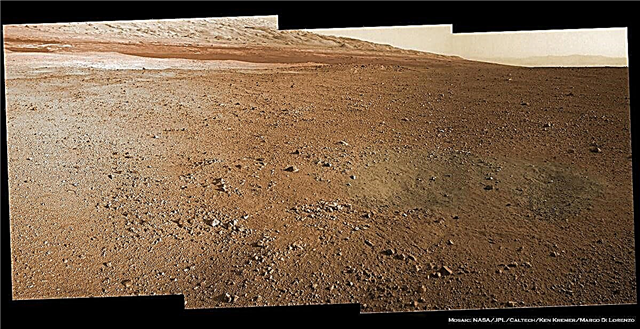
Légende de l'image: Mosaïque du mont Sharp à l'intérieur du site d'atterrissage du cratère Gale de Curiosity. Gale Crater dans la distance brumeuse. Cette mosaïque a été cousue à partir de trois images Navcam pleine résolution renvoyées par Curiosity sur Sol 2 (8 août) et colorisée en fonction des images Mastcam de la caméra 34 mm. Traitement par Ken Kremer et Marco Di Lorenzo. Crédit: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
Le rover Curiosity a retransmis les premières images détaillées du mont Sharp, offrant une vue initiale stupéfiante de son objectif de conduite ultime, et est maintenant au milieu d'une «greffe de cerveau» cruciale ce week-end qui la transformera en un rover pleinement opérationnel.
L'équipe scientifique dirigera le Curiosity à six roues pour commencer à gravir le mont Sharp à une date ultérieure au cours de la mission principale de deux ans des rovers après avoir traversé et étudié de manière approfondie le sol de son site d'atterrissage à l'intérieur de Gale Crater.
Voir notre mosaïque en se concentrant sur la base du mont Sharp en utilisant trois images pleine résolution prises par la caméra de navigation Navcam située sur la caméra et le mât d'instrument nouvellement érigés avec une colorisation basée sur la caméra couleur Mastcam de 34 millimètres.
La curiosité s'est posée presque à plat sur la surface martienne, mais avec une légère inclinaison de 3 degrés vers le bas à l'avant et les images jusqu'à présent sont prises à partir de ce point de vue préprogrammé, à environ six milles environ de la base du mont Sharp.
Le terrain est parsemé de petits cailloux qui peuvent provenir d'un éventail alluvial à proximité à travers lequel l'eau liquide a coulé il y a longtemps, pense le scientifique. Des observations effectuées en orbite avec l’orbiteur de reconnaissance de la NASA sur la NASA ont identifié des minéraux d’argile et de sulfate dans les couches inférieures du mont Sharp, indiquant une histoire humide. À des altitudes plus élevées, les scientifiques espèrent découvrir une couche limite et des indications sur ce qui a conduit au «Grand événement de dessication» et à la perte d'eau liquide sur l'ancienne surface martienne.
Ce week-end, Curiosity a également commencé à transmettre des images Mastcam haute résolution spectaculaires qui dépasseront de loin tout le reste. Voici le pano Mastcam 360 assemblé par la NASA jusqu'à présent:

Légende de l'image: Première mosaïque couleur haute résolution des images Mastcam de Curiosity. NASA / JPL-Caltech / MSSS
Mais avant que le robot de la taille d'une voiture puisse réellement se déplacer, tendez la main avec son bras chargé de 7 pieds (2 mètres) et ramassez des échantillons pour analyse par les laboratoires de chimie à bord, elle a besoin du logiciel intelligent pour accomplir les tâches scientifiques.
Avec tous les objectifs initiaux post-atterrissage atteints, les ingénieurs du Jet Propulsion Lab de la NASA à Pasadena, en Californie, passent 4 Sols, ou jours martiens, entre parenthèses ce week-end pour télécharger un nouveau logiciel nommé «R10» qui est optimisé pour les opérations de surface et remplacera le package «R9» actuel.
«Nous avons conçu la mission dès le départ pour pouvoir mettre à niveau le logiciel selon les besoins pour les différentes phases de la mission», a déclaré Ben Cichy du Jet Propulsion Laboratory de la NASA à Pasadena, en Californie, ingénieur logiciel en chef pour la mission Mars Science Laboratory. «La version du logiciel de vol que Curiosity utilise actuellement [R9] était vraiment axée sur l'atterrissage du véhicule. Il comprend de nombreuses fonctionnalités dont nous n’avons tout simplement plus besoin. Cela nous donne des capacités de base pour faire fonctionner le rover en surface, mais nous avons tout le temps prévu de basculer après l'atterrissage vers une version du logiciel de vol vraiment optimisée pour les opérations en surface. »
Les logiciels des ordinateurs principal et de secours sont mis à niveau avec soin, étape par étape. Il a déclaré qu'une première "immersion des orteils" vendredi pour tester la mise à niveau était la première étape.
«Le R10 est optimisé pour les opérations de surface et a ce que l'équipe scientifique veut. Il est en cours de téléchargement sur les quatre prochains Sols pour permettre cette mission fantastique », a déclaré Cichy lors d'une conférence de presse du JPL le 10 août. Ils se retireront de la science pour les quatre prochains Sols lors de l'installation.
"Actuellement, nous avons la capacité dans notre logiciel de surface de base pour vérifier la santé des instruments, mais nous n'avons pas vraiment la capacité d'aller utiliser pleinement tout ce matériel formidable que nous avons expédié sur Mars."
«Le logiciel R10 nous donne donc la possibilité d'utiliser pleinement le bras robotique, d'utiliser la perceuse, d'utiliser l'outil de dépoussiérage, d'utiliser toute la chaîne d'échantillonnage et de blesser les échantillons et de les analyser, tout ce truc excitant que cette mission fera . "
«Curiosity est un méga rover martien et né pour conduire! La R10 nous donne la possibilité de conduire de manière autonome et d'utiliser des images pour détecter les dangers et conduire en toute sécurité. »
Jusqu'à présent, la mise à niveau du logiciel se déroule comme prévu ce week-end.
Curiosity a effectué un atterrissage sans précédent à l'intérieur du cratère Gale le 5 et 6 août en utilisant la scène de descente «Sky Crane» propulsée par une fusée qui a abaissé Curiosity par des câbles sur la surface de la planète rouge exactement comme prévu sur les plaines à cheval sur le mont Sharp à quelques kilomètres de la base de la montagne gigantesque.
Le mont Sharp couvre une grande partie de l'intérieur du cratère Gale de 96 milles de large (154 km). Le sommet de la montagne en couches de 5,5 km est plus haut que le mont Whitney en Californie.
Pour comparaison, voir les prises de vue postérieures à l'atterrissage sur le terrain plus large de Mount Sharp en 2D et 3D à partir des caméras Hazcam fish-eye de résolution inférieure, ici
Le méga rover Curiosity de 1 tonne de la NASA est le robot le plus grand et le plus complexe jamais envoyé à la surface d'une autre planète, avec une charge utile de 10 instruments scientifiques de pointe pesant 15 fois plus que tout autre véhicule itinérant. Le but de Curiosity est de déterminer si Mars a jamais été capable de soutenir la vie microbienne, passée ou présente et de rechercher les signes de vie sous forme de molécules organiques.